https://github.com/Unity-Technologies/URDF-Importer
GitHub - Unity-Technologies/URDF-Importer: URDF importer
URDF importer. Contribute to Unity-Technologies/URDF-Importer development by creating an account on GitHub.
github.com
0. 퓨전에서 URDF를 만드는 방법은 다음 동영상 참조
https://www.youtube.com/watch?v=e-jlwTEPtIo
1. 퓨전에서 URDF Exporter로 xacro를 만들기

2. xacro를 urdf로 변환하기
xacro basic.xacro > basic.urdf
3. 유니티에서 패키지 들고오기

4. asset으로 들고오기
만든 urdf 파일에서 mesh파일과 basic.urdf을 들고오기

5. urdf 내용 수정
- 가제보 부분 삭제

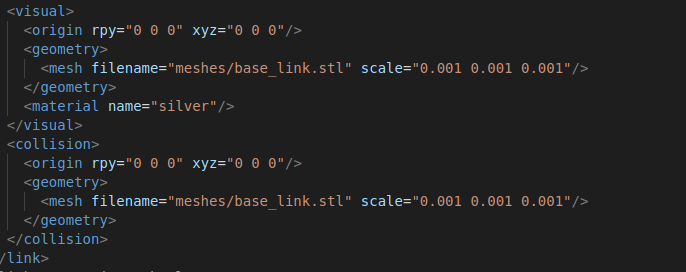
- mesh 경로 바꾸기
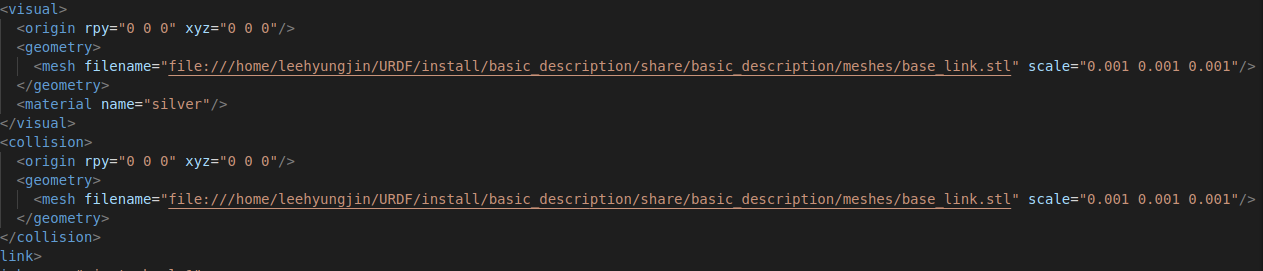
위의 사진에서 아래의 사진으로 filename 경로를 바꿔주어야한다
만약 prefab 에러가 발생한다면 메쉬의 경로가 잘못된것이다.
6. 유니티에 가져오기
asset에 urdf파일을 마우스 오른쪽을 누르고 아래의 그림의 Import Robot from URDF를 클릭한다.

7. 완성
※임포트를 할 때 V-HACD가 무엇인지 궁금하다면 아래의 블로그를 참조
[Unity Physics] Real-Time 시뮬레이션 유니티의 물리엔진 #2 (Unity 2022.1Alpha) Robotics 튜토리얼
Unity Physics 2022.05 Unity Korea Live 진행 내용 잘못 작성되어 있는 내용 또는 업데이트가 된 내용이 있다면 댓글로 알려주시면 감사하겠습니다. ref#1 Unity : Expanding the robotics toolbox: Physics c..
pnltoen.tistory.com
'ROS' 카테고리의 다른 글
| Robotics-Nav2-SLAM[ROS2-Unity] (1) | 2022.07.09 |
|---|---|
| Ros2 to Unity(TCP) (0) | 2022.07.06 |
| Ros2 to Unity(rclcs) (0) | 2022.07.04 |
| [ROS2] 토픽, 서비스, 액션 및 각각 인터페이스 비교표 (0) | 2022.06.20 |
| [ROS2] 인터페이스 (0) | 2022.06.20 |