유니티에서 공식적으로 제공해주는 로보틱스 네비게이션2 슬램 예제를 실행해보려고한다.
1. 유니티 환경 : unity 2020.3.36f1 LTS
2. 파일 설치
- git clone
https://github.com/Unity-Technologies/Robotics-Nav2-SLAM-Example/blob/main/readmes/dev_env_setup.md
GitHub - Unity-Technologies/Robotics-Nav2-SLAM-Example: An example project which contains the Unity components necessary to comp
An example project which contains the Unity components necessary to complete Navigation2's SLAM tutorial with a Turtlebot3, using a custom Unity environment in place of Gazebo. - GitHub - Unity...
github.com
git clone시 오류가 난다면 ssh키가 내 컴퓨터에 지정되어있지않아서 권한이 없는 것이다.(ssh-keygen) -recurse-submodule이 명령어가 종속성을 설치해주는데, 그냥 git clone를 한다면 종속성을 설치를 하지않고 파일만 있어 나중에 오류가 발생한다.

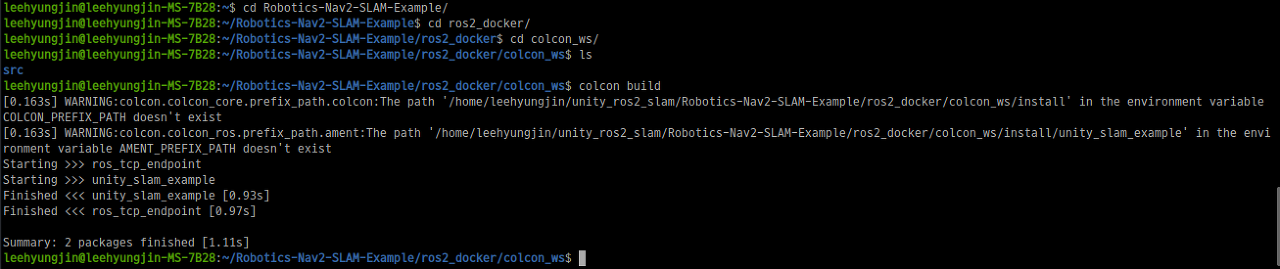
- colcon build
만약 colcon build가 안된다면 source /opt/ros/foxy/setup.bash
3. 유니티에서 열기
우분투에서 unity는 AppImage로 다운받아지는데 권한 허용해야 실행할 수 있음.
유니티 파일 만들기: 유니티 AppImage 실행 → ADD → Robotics-Nav2-SLAM-Example →Nav2SLAMExampleProject →OK
- 환경 불러오기(장면 열기)
Scenes→SimpleWarehouseScene 더블클릭

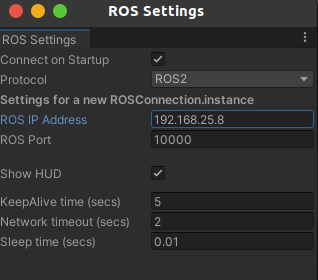
- ROS2 환경 세팅
Robotics→ROS Settings

- ifconfig로 내 ip주소 확인(ex.000.000.00.0)
ROS IP Address 변경
4. ROS2 실행
- nav2_bringup 설치
sudo apt install ros-foxy-nav2-bringup
local_setup.bash와 setup.bash 차이는 여기서
source install/local_setup.bash→ros2 launch unity_slam_example unity_slam_example.py

'ROS' 카테고리의 다른 글
| Unity urdf import (0) | 2022.07.11 |
|---|---|
| Ros2 to Unity(TCP) (0) | 2022.07.06 |
| Ros2 to Unity(rclcs) (0) | 2022.07.04 |
| [ROS2] 토픽, 서비스, 액션 및 각각 인터페이스 비교표 (0) | 2022.06.20 |
| [ROS2] 인터페이스 (0) | 2022.06.20 |